Logo original, a continuación:

Integrantes del equipo: Florencia Rocco, María Constanza Hawa, Cristobal Giacaman y Felipe Muñoz
¿Qué son los robots?
Los robots son mecanismos físicos o virtuales (como un software).
Según nuestro proyecto, un robot es un mecanismo físico, que requiere programación y cumple con tareas de manera relativamente inteligente.
Tipos de robots:
Androides
Móviles
Industriales
Médicos
Teleoperadores
Cómo ocupar engranajes y motores:
Engranajes
Utilizar engranajes rectos para potencia
Los engranajes de dientes rectos se pueden utilizar para aumentar o disminuir el par, o la potencia, de un objeto dado. Éstos se utilizan para este efecto en las lavadoras, licuadoras, secadoras de ropa, equipos de construcción, bombas de combustible y molinos. En las centrales eléctricas, los llamados "trenes" de engranajes rectos se utilizan para convertir una forma de energía, como la eólica o la energía hidroeléctrica, en energía eléctrica.
Utilizar engranajes rectos para velocidad
Los engranajes de dientes rectos se utilizan también para aumentar o disminuir la velocidad de un objeto. Por ejemplo, se utilizan en los relojes mecánicos para ajustar las velocidades relativas de las manillas de segundos, minutos y horas. En los batidores de mano, los engranajes de dientes rectos se utilizan para aumentar la velocidad del mismo para que pueda ser usado más eficazmente.
Motores
DC (corriente continua)
Un motor eléctrico de Corriente Continua es esencialmente una máquina que convierte energía eléctrica en movimiento o trabajo mecánico, a través de medios electromagnéticos.
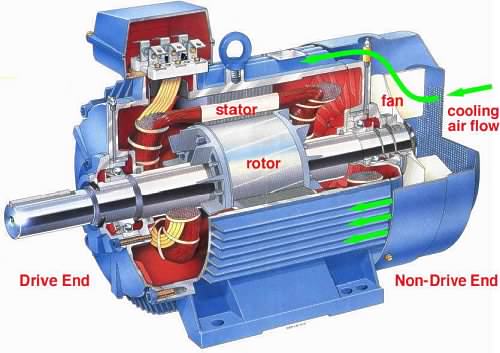
FUNDAMENTOS DE OPERACIÓN DE LOS MOTORES ELÉCTRICOS
En magnetismo se conoce la existencia de dos polos: polo norte (N) y polo sur (S), que son las regiones donde se concentran las líneas de fuerza de un imán. Un motor para funcionar se vale de las fuerzas de atracción y repulsión que existen entre los polos. De acuerdo con esto, todo motor tiene que estar formado con polos alternados entre el estator y el rotor, ya que los polos magnéticos iguales se repelen, y polos magnéticos diferentes se atraen, produciendo así el movimiento de rotación.
Un servomotor (también llamado servo) es un dispositivo similar a un motor de corriente continua que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación, y mantenerse estable en dicha posición.1
Los servomotores hacen uso de la modulación por ancho de pulsos (PWM) para controlar la dirección o posición de los motores de corriente continua. La mayoría trabaja en la frecuencia de los cincuenta hertz, así las señales PWM tendrán un periodo de veinte milisegundos. La electrónica dentro del servomotor responderá al ancho de la señal modulada. Si los circuitos dentro del servomotor reciben una señal de entre 0,5 a 1,4 milisegundos, éste se moverá en sentido horario; entre 1,6 a 2 milisegundos moverá el servomotor en sentido antihorario; 1,5 milisegundos representa un estado neutro para los servomotores estándares.
No hay comentarios:
Publicar un comentario