
jueves, 12 de noviembre de 2015
jueves, 29 de octubre de 2015

miércoles, 7 de octubre de 2015




domingo, 4 de octubre de 2015
Actualización
Lista de materiales para el proyecto:
-Automóvil especializado
para el sistema, a construir después
Para el sistema de filtro
-Sistema de
escape automóvil
- 2 filtros HEPA
- 5 kg carbón
activado
- Generador de
corriente de aire
- Herramientas
para cortar metal, entre otras cosas
- Soplete
-Pegamento
resistente
Construcción del poster:
-Hoja de block gigante
- lápices de colores
-plumones
-tijera
-pegamento.
jueves, 1 de octubre de 2015


jueves, 20 de agosto de 2015
20/08/15
Título del proyecto:
Ayudemos a limpiar nuestro medioambiente de forma preventiva
Descripción:En este proyecto se busca reducir la liberación de los gases tóxicos al medioambiente por los automóviles, con el uso de filtros HEPA y carbón activado.
Organigrama:
¿Qué es?
Es la representación gráfica de la estructura de una empresa o cualquier otra organización. Incluyen las estructuras departamentales y en algunos casos, las personas que las dirigen. Hace un esquema sobre las relaciones jerárquicas y solo presentan lo indispensable.

Actualiación: Finalmente nos mezclamos todas las tareas y todos contribuyeron en todo

Ayudemos a limpiar nuestro medioambiente de forma preventiva
Descripción:En este proyecto se busca reducir la liberación de los gases tóxicos al medioambiente por los automóviles, con el uso de filtros HEPA y carbón activado.
Organigrama:
¿Qué es?
Es la representación gráfica de la estructura de una empresa o cualquier otra organización. Incluyen las estructuras departamentales y en algunos casos, las personas que las dirigen. Hace un esquema sobre las relaciones jerárquicas y solo presentan lo indispensable.

Actualiación: Finalmente nos mezclamos todas las tareas y todos contribuyeron en todo

Carta Gantt del proyecto
jueves, 6 de agosto de 2015
RoboWars:
Nombre de nuestro equipo: Lasertrons
Logo original, a continuación:

Integrantes del equipo: Florencia Rocco, María Constanza Hawa, Cristobal Giacaman y Felipe Muñoz
¿Qué son los robots?
Los robots son mecanismos físicos o virtuales (como un software).
Según nuestro proyecto, un robot es un mecanismo físico, que requiere programación y cumple con tareas de manera relativamente inteligente.
Tipos de robots:
Androides
Móviles
Industriales
Médicos
Teleoperadores
Cómo ocupar engranajes y motores:
Engranajes
SERVO
Un servomotor (también llamado servo) es un dispositivo similar a un motor de corriente continua que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación, y mantenerse estable en dicha posición.1
Los servomotores hacen uso de la modulación por ancho de pulsos (PWM) para controlar la dirección o posición de los motores de corriente continua. La mayoría trabaja en la frecuencia de los cincuenta hertz, así las señales PWM tendrán un periodo de veinte milisegundos. La electrónica dentro del servomotor responderá al ancho de la señal modulada. Si los circuitos dentro del servomotor reciben una señal de entre 0,5 a 1,4 milisegundos, éste se moverá en sentido horario; entre 1,6 a 2 milisegundos moverá el servomotor en sentido antihorario; 1,5 milisegundos representa un estado neutro para los servomotores estándares.
Logo original, a continuación:

Integrantes del equipo: Florencia Rocco, María Constanza Hawa, Cristobal Giacaman y Felipe Muñoz
¿Qué son los robots?
Los robots son mecanismos físicos o virtuales (como un software).
Según nuestro proyecto, un robot es un mecanismo físico, que requiere programación y cumple con tareas de manera relativamente inteligente.
Tipos de robots:
Androides
Móviles
Industriales
Médicos
Teleoperadores
Cómo ocupar engranajes y motores:
Engranajes
Utilizar engranajes rectos para potencia
Los engranajes de dientes rectos se pueden utilizar para aumentar o disminuir el par, o la potencia, de un objeto dado. Éstos se utilizan para este efecto en las lavadoras, licuadoras, secadoras de ropa, equipos de construcción, bombas de combustible y molinos. En las centrales eléctricas, los llamados "trenes" de engranajes rectos se utilizan para convertir una forma de energía, como la eólica o la energía hidroeléctrica, en energía eléctrica.
Utilizar engranajes rectos para velocidad
Los engranajes de dientes rectos se utilizan también para aumentar o disminuir la velocidad de un objeto. Por ejemplo, se utilizan en los relojes mecánicos para ajustar las velocidades relativas de las manillas de segundos, minutos y horas. En los batidores de mano, los engranajes de dientes rectos se utilizan para aumentar la velocidad del mismo para que pueda ser usado más eficazmente.
Motores
DC (corriente continua)
Un motor eléctrico de Corriente Continua es esencialmente una máquina que convierte energía eléctrica en movimiento o trabajo mecánico, a través de medios electromagnéticos.
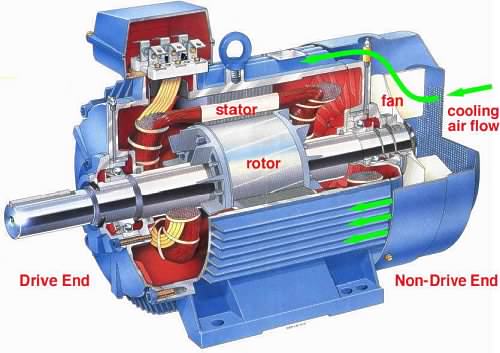
FUNDAMENTOS DE OPERACIÓN DE LOS MOTORES ELÉCTRICOS
En magnetismo se conoce la existencia de dos polos: polo norte (N) y polo sur (S), que son las regiones donde se concentran las líneas de fuerza de un imán. Un motor para funcionar se vale de las fuerzas de atracción y repulsión que existen entre los polos. De acuerdo con esto, todo motor tiene que estar formado con polos alternados entre el estator y el rotor, ya que los polos magnéticos iguales se repelen, y polos magnéticos diferentes se atraen, produciendo así el movimiento de rotación.
Un servomotor (también llamado servo) es un dispositivo similar a un motor de corriente continua que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación, y mantenerse estable en dicha posición.1
Los servomotores hacen uso de la modulación por ancho de pulsos (PWM) para controlar la dirección o posición de los motores de corriente continua. La mayoría trabaja en la frecuencia de los cincuenta hertz, así las señales PWM tendrán un periodo de veinte milisegundos. La electrónica dentro del servomotor responderá al ancho de la señal modulada. Si los circuitos dentro del servomotor reciben una señal de entre 0,5 a 1,4 milisegundos, éste se moverá en sentido horario; entre 1,6 a 2 milisegundos moverá el servomotor en sentido antihorario; 1,5 milisegundos representa un estado neutro para los servomotores estándares.
Suscribirse a:
Comentarios (Atom)